-
第一章自动控制的一般概念
第1章 自动控制系统的一般概念 (课程目标1)
本章重点:控制系统的组成、负反馈原理和控制系统的分类、基本要求等。
本章难点:控制系统的基本性能要求。
1.1自动控制技术的发展概况
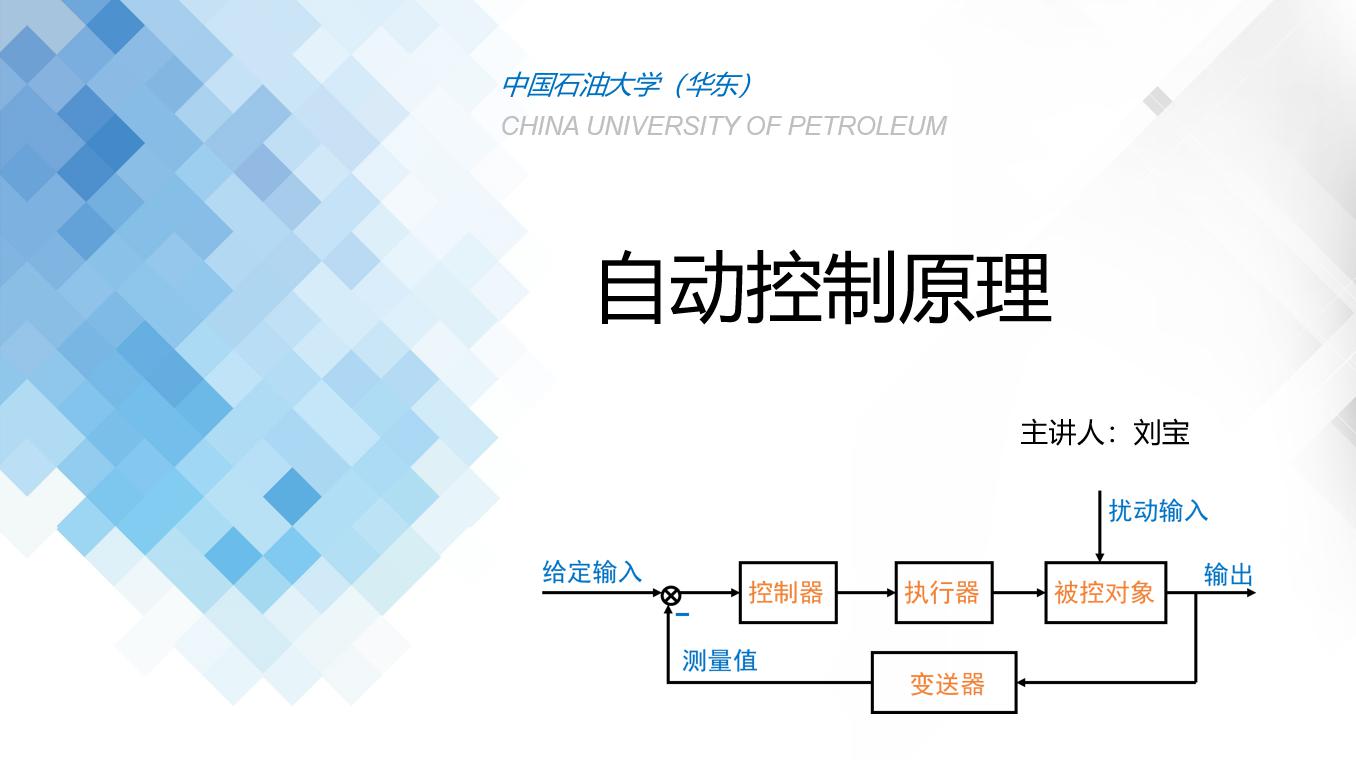
1.2自动控制系统的基本组成;自动控制实例;原理方框图
1.3自动控制系统的分类;开环与闭环系统;反馈控制原理;其他分类方法
1.4自动控制系统的基本性能要 -
●1.1自动控制系统的组成及控制原理
自动控制系统的基本组成;自动控制实例;原理方框 -
●1.2自动控制系统
自动控制系统的分类;开环与闭环系统;反馈控制原理;其他分类方法
自动控制系统的基本性能要求
-
第二章控制系统的数学模型
第2章 动态系统的数学模型 (课程目标2)
本章重点:建立机理模型的思路和方法,传递函数的概念,结构图等效变换。
本章难点:结构图等效变换。
2.1引言
数学模型与系统分析和系统设计的关系,静态模型,动态模型,各种建模方法。
2.2物理装置的数学模型
机理模型(力学定律、电学定律、热力学定律、化学反应定律等机理;物料平衡、能量平衡等方法),非线性环节的线性化,无量纲增量的微分方程。
2.3控制系统的数学模型
建模举例,负载效应与信号的单向性,拉普拉斯变换及其应用。
2.4传递函数与动态结构图
传递函数与动态结构图的概念;典型环节传递函数,动态结构图的变换与简化。
2.5信号流图
信号流图基本概念,梅逊增益公式及其应用。 -
●2.1微分方程模型
微分方程的建立、概念
-
●2.2非线性系统的线性化
非线性系统线性化的方法、局限
-
●2.3传递函数(一)
传递函数的概念
-
●2.4传递函数(二)
传递函数的性质、求解
-
●2.5结构图的组成和绘制
结构图的基本组成,2种绘制方法
-
●2.6结构图的等效变换法则
串联、并联、反馈
-
●2.7结构图等效变换法则的应用
结构图化简求传递函数
-
●2.8信号流图
信号流图中各环节的含义、从结构图绘制信号流图的方法
-
●2.9梅森增益公式
用梅森公式求解系统传递函数
-
●2.10数学模型的典型例题
水箱建模、结构图画信号流图、求传递函数
-
第三章线性系统的时域分析法
第3章 线性系统的时域分析法 (课程目标3、4、5)
本章重点:稳定性、稳态误差和瞬态性能的概念,二阶系统阶跃响应的性能指标与特征参数之间的关系,调节规律及参数对系统性能的影响等。
本章难点:稳态误差,调节规律及参数对系统性能的影响。
3.1引言
时域分析法的特点,典型输入信号和时域性能指标。
3.2一阶系统的瞬态响应
阶跃响应分析,系统参数与瞬态性能的关系,其他典型输入信号响应,线性系统的特性(叠加原理、积分性质、微分性质)。
3.3二阶系统的瞬态响应
典型二阶系统的阶跃响应,特征根与特征参数的关系。动态性能指标的计算,零极点的影响,二阶系统瞬态性能的改善。
3.4高阶系统的瞬态响应
三阶系统的阶跃响应,高阶系统的阶跃响应分析(各种响应分量与特征根分布的关系),主导极点的概念。
3.5稳定性分析
稳定性定义,稳定的充要条件,稳定判据及其应用,相对稳定性的概念。
3.6稳态误差分析
稳态误差概念,开环系统的型别(按1/s因子个数判断),误差系数计算(Kp,Kv,Ka),扰动作用下的稳态误差,参数变化时引起的稳态误差及反馈系统的特点,动态误差系数,PID参数及规律对系统性能的影响。 -
●3.1控制系统的时域指标
时域性能指标、典型输入信号
-
●3.2一阶系统时域分析
一阶系统模型、单位阶跃响应
-
●3.3二阶系统的数学模型
二阶系统开环传递函数、闭环传递函数、阻尼比、自然频率
-
●3.4二阶系统的单位阶跃响应
不能阻尼比下二阶系统的单位阶跃响应曲线
-
●3.5欠阻尼二阶系统的动态性能分析
超调量、调节时间、上升时间、峰值时间
-
●3.6过阻尼系统的动态性能分析
过阻尼系统的单位阶跃响应
-
●3.7二阶系统性能的改善
PD控制、测速发电机
-
●3.8高阶系统的时域分析
主导极点、偶极子
-
●3.9线性系统的稳定性分析
稳定性的概念、充分必要条件
-
●3.10劳斯稳定判据
劳斯表
-
●3.11劳斯判据的特殊情况
劳斯表第一列为0的情况
-
●3.12劳斯判据的应用
判断系统稳定时k的取值范围
-
●3.13线性系统的稳态误差计算
稳态误差的定义
-
●3.14给定输入下的稳态误差
给定输入下稳态误差的计算公式、表格
-
●3.15扰动输入下的稳态误差
扰动输入下稳态误差的计算公式
-
●3.16时域分析的典型例题
典型例题
-
第四章线性系统的根轨迹法
第4章 线性系统的根轨迹法 (课程目标4、5)
本章重点:负反馈控制系统根轨迹的绘制方法,闭环极点与瞬态响应的关系,PID参数对系统性能的影响等。
本章难点:根轨迹的绘制方法,闭环极点与瞬态响应的关系。
4.1引言
时域分析法的局限性,根轨迹法的特点。
4.2根轨迹方程
根轨迹方程,幅值条件和相角条件。
4.3根轨迹绘制
根轨迹的绘制法则与举例,正反馈根轨迹绘制法则,参量根轨迹的绘制。
4.4根轨迹分析
闭环系统特征根与瞬态性能的关系,根轨迹上主导极点确定,开环零极点对系统性能的影响,PID参数(Kp,Ti,Td)的参量根轨迹及对系统性能的影响。 -
●4.1根轨迹法的基本概念
根轨迹的概念、根轨迹方程
-
●4.2根轨迹绘制法则(一)
法则1-4
-
●4.3根轨迹绘制法则(二)
法则5-6
-
●4.4根轨迹绘制法则(三)
法则7-8
-
●4.5广义根轨迹
参数根轨迹、零度根轨迹
-
●4.6根轨迹与系统性能分析
附加开环零点、极点对根轨迹的影响
-
●4.7根轨迹绘制的典型例题
典型例题讲解
-
第五章线性系统的频域分析法
第5章 线性系统的频率分析法 (课程目标4、5)
本章重点:频率特性的概念,典型环节的频率特性,Nyquist稳定判据,开环频域指标(ωc,γ)与闭环频域指标(Mp,ωb),典型二阶系统的频域分析。
本章难点:Nyquist稳定判据,典型二阶系统的频域分析。
5.1频率特性的概念
频率特性的定义,频率特性与传递函数的关系。
5.2频率特性的几种曲线表示法。
5.3典型环节的频率特性。
5.4 Nyquist稳定判据
幅角原理,由开环Nyquist曲线、Bode曲线判断闭环稳定性。
5.5最小相位系统与稳定裕度的概念
由开环Bode曲线确定最小相位系统的开环传递函数,开环频率特性与闭环频率特性之间的关系。
5.6系统性能分析
由开环频率特性确定误差系数(Kp,Kv,Ka),频率特性的一些重要性质,闭环频率特性,频率特性指标(放大系数、稳定裕度、穿越频率、谐振峰值、谐振频率、频带宽度等),典型一阶系统、二阶系统的频率特性与时域性能指标的关系,高阶系统性能估计。 -
●5.1频率特性概念
频率特性的定义、s=jw
-
●5.2频率特性图示方法
奈氏图、伯特图
-
●5.3典型环节频率特性
8种典型环节的奈氏图和伯特图
-
●5.4开环幅相频率特性绘制
起点、终点、交点
-
●5.5开环幅相频率特性曲线的典型例题
奈氏图绘制的典型例题
-
●5.6开环对数幅相频率特性曲线
伯特图的绘制通用方法
-
●5.7最小相位系统
最小相位系统的概念
-
●5.8开环对数幅相频率特性曲线的典型例题
伯特图的典型例题
-
●5.9奈氏稳定判据数学基础
幅角原理
-
●5.10奈式稳定判据介绍
稳定判据
-
●5.11奈氏稳定判据应用
稳定判据的应用,取值范围
-
●5.12对数频域稳定判据
将奈氏稳定判据扩展到伯特图上
-
●5.13稳定裕度
相角裕度、幅值裕度、wc、wx
-
●5.14稳定判据的典型例题
奈氏稳定判据的典型例题
-
第六章线性系统的校正方法
第6章 线性系统的校正方法 (课程目标5)
本章重点:超前校正与滞后校正,PID参数对系统性能的影响。
本章难点:超前校正与滞后校正。
6.1系统的设计与校正问题,性能指标
6.2校正装置
校正装置的分类和特性、连接方式。
6.3频率特性校正法
串联超前校正,串联滞后校正,串联超前—滞后校正,期望频率特性校正法。 -
●6.1线性系统校正概述
校正的概念、常用性能指标
-
●6.2校正方式与基本控制律
校正方式、PID控制
-
●6.3无源超前校正
电路图、原理
-
●6.4滞后校正与滞后超前校正
电路图、原理
-
●6.5系统校正的典型例题
串联超前和串联滞后校正网络的应用
-
第七章线性离散系统的分析
第7章 线性离散控制系统的分析与校正 (课程目标2、4)
本章重点难点:离散时间系统的特点,采样系统的数学描述及分析设计方法。
本章难点:采样系统的数学描述及分析设计方法。
7.1离散系统的基本概念
采样信号特点,连续信号采样,采样定理。
7.2 Z变换理论
7.3离散系统的数学模型
差分方程,脉冲传递函数。
7.4离散系统的分析
离散系统的稳定性、稳态误差及性能分析。
7.5离散系统的动态性能分析及数字校正 -
●7.1离散系统的基本概念
离散信号、采样控制系统、计算机控制系统
-
●7.2信号的采样
香农采样定理、零阶保持器
-
●7.3离散系统的数学模型
差分方程、z变换、脉冲传递函数
-
●7.4开环脉冲传递函数
两个环节串联,环节间有/无采样开关
-
●7.5闭环脉冲传递函数
闭环脉冲传递函数、系统输出的Z变换
-
●7.6离散系统的稳定性
稳定的充分必要条件、劳斯判据
-
●7.7采样周期与开环增益对离散系统稳定性的影响
T一定时,K越大系统稳定性越差
K一定时,T越大系统稳定性越差 -
●7.8离散系统稳态误差
系统稳定的前提下,终值定理
-
●7.9离散系统分析的典型例题
离散系统典型例题解析
-
第八章非线性控制系统分析
第8章 非线性控制系统分析 (课程目标4)
本章重点:描述函数概念及其分析系统稳定性的方法
本章难点:描述函数概念及其分析系统稳定性的方法,相平面的概念及其分析控制系统的方法。
8.1引言
实际控制系统中的非线性因素,典型非线性特性,非线性系统的特点,分析非线性系统的方法。
8.2描述函数法
描述函数的概念及其计算,描述函数分析非线性系统稳定性的方法。 -
●8.1非线性控制系统概述
概念、典型非线性系统、特点
-
●8.2描述函数的概念
非线性环节的描述函数的求解
-
●8.3描述函数法
判断稳定性和周期运动
-
●8.4描述函数法的典型例题
描述函数法的应用